Unistellar eVscope: Vergleich des Gesichtsfeldes mit dem der Atik Infinity-Kamera
Einführung | Gesichtsfeld | Atik Infinity | eVscope, Atik Infinity, Stellina und Hiuni | Fazit | Links
Archiv
Auf dieser Seite versuche ich, das Gesichtsfeld des Unistellar eVscopes mit dem der Atik Infinity-Kamera an verschiedenen Teleskopen zu vergleichen.
Hinweis: Siehe Seite Übersicht der Unistellar-Seiten für genau dieses!
Einführung
Da ich mir in "Vorfreude" oder Vorbereitung auf das eVscope, dessen Auslieferung erst für November 2018 versprochen war, eine Atik Infinity-Kamera gekauft habe, war für mich natürlich von Interesse, ob beide Lösungen eine ähnliche Bildqualität und -größe (Gesichtsfeld) liefern (oder wie man ein ähnliches Gesichtsfeld erreichen kann).
Hinweis: Einen ersten Anhalt hinsichtlich der Bildqualität liefert die Seite Atik Infinity Colour-Kamera gegen eVscope - Fotovergleich.
Zunächst einmal unterscheiden sich die Sensoren darin, dass der IMX224 ein CMOS-Sensor und der ICX825 ein traditioneller CCD-Sensor ist. Zweitens unterscheiden sie sich in ihrer Größe: die Diagonale des ICX825 in der Atik Infinity ist fast doppelt so groß (11 mm) wie die des IMX224 im eVscope (5,5 oder 6,1 mm, je nach Anwendungsart). Beide Sensoren verfügen über ähnliche Pixelzahlen (1392 x 1040 versus 1305 x 977/1280 x 960*); dementsprechend sind die (quadratischen) Pixel des ICX825 etwa dreimal so groß wie die des IMX224 (6,45 µm gegen 3,75 µm Kantenlänge). Was das alles in der Praxis zu bedeuten hat, werde ich wohl erst im Laufe der Zeit herausfinden...
*) Das eVscope verwendet die Auflösung von 1280 x 960 Pixel.
Gesichtsfeld...
In seiner FAQ gibt Unistellar für das eVscope ein Gesichtsfeld von ~30' (ca. 0,5°, etwa Mond- oder Sonnendurchmesser) an, außerdem, dass ein Pixel einem Bildwinkel von etwa 1,7" entspricht. Mit dem Gesichtsfeldrechner auf Astronomy.tools, erhielt ich eine Auflösung von 1.72" und werde diese in meinen Berechnungen verwenden, wo es angebracht ist.
Wenn ich 1,72" mit 1280 Pixel multipliziere, erhalte ich 36,7' (oder 0,61°), also deutlich mehr als die angegebenen 30'.
Im folgenden ermittle ich das (wahre) Gesichtefeld noch auf vier andere Weisen:
- aus der Teleskopbrennweite und der Sensorgröße (die längere Seite)
- mit dem Gesichtsfeldrechner von Astronomy.tools
- anhand des Monddurchmessers auf einem eVscope-Foto
- mit Stellarium anhand der aus der Teleskopbrennweite und der Sensordaten
Gesichtsfeld aus Teleskopbrennweite und Sensorgröße
Für das Gesichtsfeld einer Kamera in Verbindung mit einem Teleskop gibt Oden die folgende Näherungsformel an:
- Winkel (°) = Seitenlänge des Sensors (mm) / Brennweite des Teleskops (mm) * (180° / pi) (180/pi = 57,3...)
Gehe ich von 1280 Pixeln aus, komme ich bei einer Pixelgröße von 3,75 µm auf eine Seitenlänge von 4,8 mm; die Brennweite des eVscopes ist 450 mm. Beides in die Formel eingesetzt ergibt:
- Winkel (°) = 4,8 (mm) / 450 (mm) * (180° / pi) = 0,61° = 36,7'
Dieser Wert entspricht genau dem oben für 1280 x 960 Pixel ermittelten.
Gesichtsfeldrechner auf Astronomy.tools
In den Gesichtsfeldrechner auf Astronomy.tools habe ich folgende Werte eingegeben:
- Brennweite: 450 mm, Öffnung: 114 mm
- Pixelzahl: 1280 x 960, Pixelgröße: 3,75 µm x 3,75 µm
Ergebnisse:
- Gesichtsfeld: 0,61° x 0,46° (36,7' x 27,6')
- Auflösung: 1,72" x 1,72"
Das sind praktisch die Werte, die auch mit der Formel von Oden und den Daten von Unistellar ermittelt habe. Außerdem bevorzuge ich den Auflösungswert gegenüber dem von Unistellar angegebenen, weil er eine Dezimalstelle genauer ist.
Abschätzung des Gesichtsfeldes anhand des Monddurchmessers
Im Mai 2020 habe ich den Fast-Vollmond mit dem eVscope fotografiert. Anhand des Fotos habe ich seinen Durchmasser auf 1180 Pixel geschätzt, was einem Sehwinkel von etwa 30' entspricht (laut Wikipedia 29,4' bis 33,5'). Da der Mond diesmal recht groß war und ich seinen Sehwinkel nicht finden konnte, habe ich einen Wert von 33' dafür angenommen.
- Abschätzung des eVscope-Bildfeldes: Mond ca. 1180 Pixel Durchmesser
= 33'
33': 1280 Pixel = 35,8'; 960 = 26,8'
Das ist etwas weniger als errechnet, aber auch mit gewissen Ungenauigkeiten verbunden; insofern stimmt der abgeschätzte Wert recht gut mit den berechneten Werten überein.
Gesichtsfeld aus Teleskopbrennweite und Sensordaten in Stellarium
Im Sommer 2020 habe ich die Daten für das eVscope und seinen Sensor in Stellarium eingegeben:
- Brennweite: 450 mm, Öffnung: 112 mm (gleiches Gesichtsfeld wie bei 114 mm!)
- Pixelzahl: 1280 x 960, Pixelgröße: 3,75 µm x 3,75 µm
Ergebnisse:
- Gesichtsfeld: 36,67' x 27,5'
- Auflösung: 1,72" x 1,72"
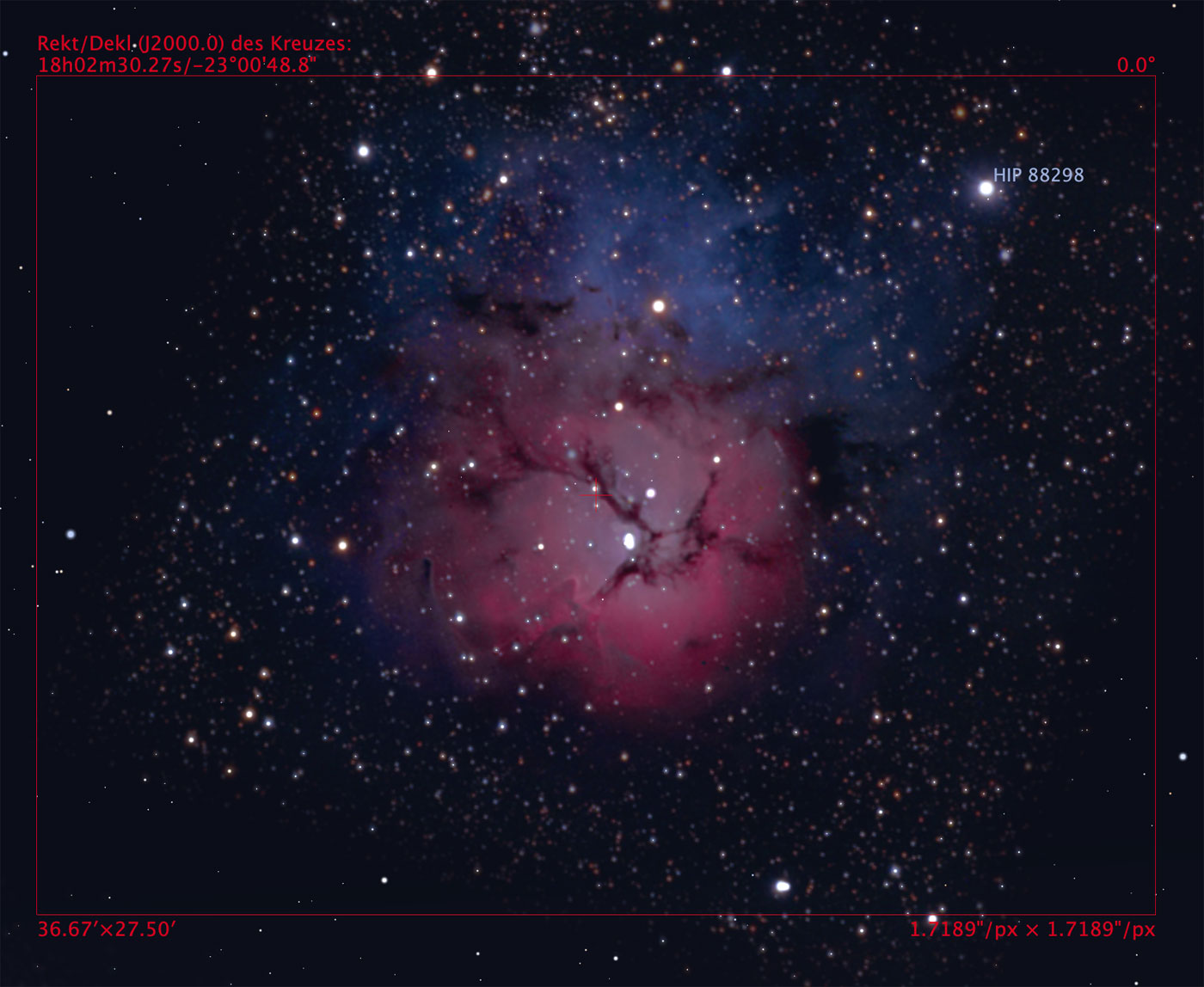
Zur Illustration habe ich einen Vergleich zwischen einem eVscope-Foto und der Anzeige in Stellarium anhand des Trifidnebels M 20 gemacht:
 |
 |
|
Bildfeldanzeige für das eVscope in Stellarium mit M 20 (Trifidnebel) |
eVscope-Foto von M 20 (Trifidnebel) |
Zu beachten ist noch, dass ich links wegen der Beschriftung des Rahmens in Stellarium einen etwas größeren Ausschnitt zeige. Alles in allem scheint die Übereinstimmung recht gut zu sein. Zu beachten ist noch, dass viele DSO in Stellarium als Fotos mit einem recht kleinen Bildausschnitt gezeigt werden. Immerhin sieht man dann, dass diese Objekte in das Bildfeld des eVscopes passen...
Atik Infinity
Atik gibt für die Winkelauflösung (in Sekunden) pro Pixel der Atik Infinity-Kamera folgende Formel an (es ist eine angepasste Version der oben verwendeten Formel von Oden):
- Pixelgröße (µm) / Brennweite (mm) * 206,3 = 6,45 / Brennweite * 206,3 = 1330,6 / Brennweite
Um die Seitenlänge des Sensors zu erhalten, muß die Pixelgröße noch mit der entsprechenden Anzahl Pixel multipliziert werden (es ergeben sich 9 mm). Wenn ich in diese Formel die Werte für ein Teleskop mit 450 mm Brennweite (z.B. ein f/4-Newton mit 114 mm Öffnung) einsetze, so wie es im eVscope verwendet wird, erhalte ich ein Gesichtsfeld von 1,14° (68,6'), also recht ähnliche Werte wie für ein 9 mm-Plössl-Okular, das 50-fach vergrößern würde. Ein Teleskop mit 500 mm Brennweite (z.B. ein f/4,38-Newton mit 114 mm Öffnung) liefert mit dem 9 mm-Plössl-Okular praktisch identische Werte, also ein Gesichtsfeld von etwa einem Grad.
Andere Teleskopbrennweiten führen natürlich zu anderen Werten für das Gesichtsfeld. Identische Gesichtsfelder für beide Sensoren würde ich erhalten, wenn sich die Brennweiten der verwendeten Teleskope wie die horizontalen Kantenlängen der Sensoren verhalten würden:
- eVscope: 4,8/450 = 0,0167
- Atik Infinity: 9/x * 450/4,8 => x = 9/4,8*450 = 843,75, also ca. 750...900 mm
Ein Teleskop mit einer tatsächlichen oder verkürzten/verlängerten Brennweite von etwa 750 bis 900 mm würde also ein ähnliches Gesichtsfeld haben wie das eVscope. Unterschiede ergeben sich aus den unterschiedlichen Öffnungsverhältnissen und Lichtsammelleistungen der verwendeten Teleskope, sowie der Unterschiede in der Lichtempfindlichkeit und im Rauschverhalten der beiden Sensoren. Der Sensor im eVscope besitzt nur ein Drittel der Fläche des Sensors der Atik Infinity. Bei ähnlicher Pixelzahl sind dementsprechend auch die Pixel nur gut 1/3 so groß, was bedeutet, dass sie nur 1/3 des Lichts empfangen und damit um 1,5 Blendenstufen unempfindlicher sind als die im Sensor der Atik Infinity. Auf der anderen Seite hat das eVscope ein Öffnungsverhältnis von f/4, und das ist entscheidend für die Belichtungszeit. Was also die Konsequenzen all dieser Unterschiede sind, bleibt noch zu klären...
eVscope, Atik Infinity, Stellina und Hiuni
Zum Abschluss eine Vergleichtabelle (von einer anderen Seite auf dieser Website "entliehen"), die auch das Stellina-Teleskop von Vaonis und das Hiuni-Teleskop einschließt und in der man sehen kann, wie die unterschiedlichen Sensoren und bei der Atik Infinity, Teleskope, das Gesichtsfeld und die Auflösung beeinflussen.
| Teleskop/Kamera > | Hiuni | Stellina | eVscope | Infinity |
||||
| Hersteller | Bosma | Vaonis | Unistellar | Atik |
||||
| Teleskop (AI) | Custom, Cassegrain | Custom, Refraktor | Custom, Newton | 6" Newton Explorer 150PDS, StarBlast 6, ... |
5" Newton Heritage P130, Sky Prodigy 130, ... |
4,5" Newton Heritage 114N, StarBlast 114, ... |
4.5" Newton StarBlast 4.5, ... |
8" Schmidt-Cassegrain C8 mit f/6.3 Reducer |
| Hersteller (AI) | SkyWatcher, Orion | Sky-Watcher, Celestron | Sky-Watcher, Orion | Orion | Celestron | |||
| Brennweite | 1540 mm | 400 mm | 450 mm | 750 mm | 650 mm | 500 mm | 450 mm | 1280 mm |
| Öffnung | 154 mm | 80 mm | 112 mm | 150 mm | 130 mm | 114 mm | 114 mm | 203 mm |
| Öffnungsverhältnis | f/10 | f/5 | f/4 | f/5 | f/5 | f/4,5 | f/4 | f/6,3 |
| Auflösungsvermögen Teleskop (Dawes) | 0,79"§/0.75"* | 1,45"* | 1,02"* | 0,77"* | 0,89"* | 1,02"* | 1,02"* | 0,57"* |
| Auflösungsvermögen Teleskop (Rayleigh) | 0,92"§ | 1,73" | 1,12" | 0,92" | 1,06" | 1,12" | 1,12" | 0,68" |
| Sensor | Aptina MT9M001-C/M | Sony IMX178 | Sony IMX224 | Sony ICX825 |
||||
| Sensortyp | CMOS | CMOS | CMOS | CCD |
||||
| Pixelauflösung | 1280 x 1024 | 3096 x 2080 | 1280 x 960 | 1392 x 1040 |
||||
| Pixelgröße | 5,2 µm x 5,2 µm | 2,4 µm x 2,4 µm | 3,75 µm x 3,75 µm | 6,45 µm x 6,45 µm |
||||
| Auflösung H | 0,27°/16,2' 10,3° (Sucher) |
1° (1,06°/63,6'*) | ~30' (0,5°) (0,61°/36,7'*) |
0,69°/41,16'** | 0,79°/47,49'** | 1,03°/61,74'** | 1,14°/68,60'** | 0,40°/24,12'** |
| Auflösung V | 0,2°* | 0,7° (0,71°*) | 0,46°/27,6'* | 0,51°* | 0,59°* | 0,77°* | 0,85°* | 0,30°* |
| Auflösung/Pixel | 0,7"* | 1,24"* | 1,72"* | 1,77"** | 2,05"** | 2,66"** | 2,96"** | 1,04"** |
*) Mit Astronomy.tools berechnet; **)
eigene Berechnungen, mit Astronomy.tools überprüft
+) auch berechnet aus 114/Öffnung; ++) berechnet aus 138/Öffnung; § Herstellerangabe
Fazit
Das eVscope benutzt den Sensor mit 1280 x 960 Pixeln (ein bestimmter Modus des Sensors) und hat eine rechnerische Auflösung von 36,7' oder 0,61° (Pixelauflösung 1,72"). Die Atik Infinity verwendet 1392 x 1040 Pixel, und ihre Pixelauflösung und damit das Sichtfeld hängt von der Brennweite des verwendeten Teleskops ab. Eine Brennweite von ca. 850 mm würde dem Gesichtsfeld des eVscopes nahe kommen.
Das Stellina von Vaonis hat ein fast doppelt so großes Gesichtfeld wie das eVscope, so dass es auch für ausgedehntere DSO tauglich ist. Die gut 4-fach höhere Sensorauflösung schlägt sich jedoch in der Detailwiedergabe weniger deutlich nieder: ein 15' großes Objekt (z.B. M 13 im Herkules) erstreckt sich beim eVscope über 523 Pixel, beim Stellina über 726 Pixel; das ist ein Faktor von fast 1,4 - nicht welt-bewegend... Neben der Pixelzahl ist aber auch noch die "Qualität" der Pixel (Rauschverhalten usw.) von Bedeutung, zu der ich im Moment nichts sagen kann, außer, dass die Pixel des eVscope-Sensors deutlich größer sind als die des Stellina-Sensors (3,75 µm gegenüber 2,4 µm).
Das Hiuni-Telskop ist eher für die Beobachtung von Planeten und des Mondes als für DSOs geeignet. Daran ändern auch die große Öffnung und die großen Pixel nichts, die maximale Magnitude ist mit 12,8 vergleichweise niedrig. Das Gesichtsfeld erfasst nur den halben Mond! Aber vielleicht kann Hiuni bei einigen kleineren DSOs (z.B. Kugelsternhaufen, Ringnebel M 57) seine Stärken ausspielen... Beachten Sie, dass ein 15'-Objekt wie der Herkules-Kugelsternhaufen M 13 fast die gesamte Breite des Bildfeldes des Huini-Teleskops abdeckt (und größer ist als dessen Höhe). Damit bietet Hiuni etwa die doppelte Anzahl von Pixeln für dieses Objekt, als das eVscope anbietet.
Eine weitere Sache fällt mir noch auf, aber mir fehlt das Wissen, dies genauer zu bewerten. Bei allen gezeigten Lösungen für die Atik Infinity löst das Teleskop mehr als 2-fach besser auf (nach Dawes) als der Pixelauflösung des Sensors entspricht. Man könnte also sagen, dass die Teleskop-Tuben "überdimensiniert" für die Kamera sind. Beim eVscope hat man immerhin noch den Faktor von fast 1,7, aber bei Stellina und Hiuni löst der Sensor besser auf als das Teleskop. Hier könnte man sagen, dass ihre Sensoren "überdimensioniert" sind und dass die Teleskope nicht ganz damit Schritt halten können. Was dies in der Praxis bedeutet, kann ich zur Zeit leider nicht sagen...
Links
- Unistellar-Website: unistellaroptics.com
- eVscope Kickstarter-Kampagne: www.kickstarter.com/projects/unistellar/evscope-100-times-more-powerful-than-a-classical-t/
- Peter Oden: Videoastronomie: Der Himmel live und in Farbe. Sterne und Weltraum, Juni 2017.
- Gesichtsfeldrechners auf Astronomy.tools (von First Light Optics Ltd): astronomy.tools/calculators/field_of_view/
- Vaonis: vaonis.com/fr/ (FR), vaonis.com (EN)
- Stellina-Produktseite: vaonis.com/fr/produits (FR), vaonis.com/telescopes (EN)
- Siehe auch meine Seite mit Astronomie-Links.
|
made by |
| 20.09.2022 |